行业近年来进入高速发展时期。升降横移式、平面移动式、垂直升降式和垂直作为四类主流车库类型。垂直循环式立体车库具有以下优点:运行平稳,安全可靠;存取方便,经济性高;设计美观,可以作为城市景观;占地少,容量大,利用2.5个地面停车位的位置最多可停放数十辆汽车。
工作原理
垂直循环式停车设备采用垂直于地面的循环运动来存取车辆。工作原理:减速电机带动传动机构,在牵引链条上每隔一定距离安装一个存车托架。车辆停放在存车托架上。电机转动时,存车托架与链条一起循环运动,到达地面时用户即可存取车辆。
存车时,用户输入车位号码,系统自动选择耗时最短的旋转方向,将目标托架移动至地面层。用户将车辆驶入停妥后即可离开。取车方法与存车相同。目标托架移动至地面后,用户将车辆驶离。
系统设计
2.1 方案设计
本文主要依7层12个车位的垂直循环式立体车库的控制系统设计。
设备控制系统以PLC为控制器,使用变频器驱动循环电机。循环电机可变速运行,起停平缓。系统启动后,电机先高速运行;接近地面时,电机降为低速运行;到达停止位置后,电机在低速状态下停止,电机抱闸快速锁紧。
使用非接触式接近开关作为定位元件。通过接近开关进行计数,控制器存储每个存车托架的位置,从而可计算出耗时最短的旋转方向。
2.2 功能设计
2.2.1 人机接口
使用立体车库专用彩屏操作器,可以为用户提供多种车位号码输入方式:按键、感应卡和手机蓝牙扫码。操作器集成操作模式切换功能,系统可区分手动和自动操作模式。用户正常使用时为自动模式,特殊情况下管理员使用手动模式。操作器上提供急停按钮,用于紧急情况下的停机制动。
使用LED 屏显示系统状态,即设备状态(正在运行、急停、停用等)和报警信息。
使用LED 屏显示空闲车位数和空闲车位号。由于设备高度达16 m,用户无法目视设备内是否有空车位,空车位的车位号也不得而知。有空车位时,LED 屏交替显示空闲车位数和空闲车位号。无空车位时,LED 屏显示“车位已满”。
系统使用红色旋转指示灯作为运行警示,使用蜂鸣器进行报警提示。
2.2.2 定位功能
由于车位托架循环运行,系统需要计算并存储每个车位的位置。显然,只要已知第1号车位的位置,其他车位按照顺序排列即可。因此,使用一个定位开关专门标定第1号车位。设备首次上电后,系统需要对第1号车位进行寻址操作。
垂直循环立体车库具有两个旋转运行方向,规定其中一个方向为正方向,另一个方向为负方向。第1号车位确定后,使用另一个定位开关进行计数,正方向运行时计数器增加,负方向运行时计数器减少。通过计数器的数值,可以计算出每个车位与地面的距离。第1号车位和第12号车位之间过渡时,计数器需要重新赋值。
2.2.3 车库门联锁
车库自动门与设备联锁运行。车库门打开时,循环电机不能运行;循环电机运行之前,车库门必须关闭。车库门关闭过程中,如果有人车闯入,车库门停止关闭,并发出声光报警。
2.2.4 检测装置
1)超长检测
超长检测使用对射型光电开关,分别安装在车库一层的前端和后端。车辆驶入车库后,如果光线被遮挡,系统则认为车辆超长。
2)人车闯入检测
人车闯入检测使用对射型光电开关,安装在车库入口处。车库门关闭时,如果光线被遮挡,系统认为人车闯入,设备停止运行并报警。
3)车辆有无检测
车辆有无检测使用对射型光电开关,安装在一层,采用对角线照射。如果托架上有车,光线被遮挡,系统则记录此车位有车。
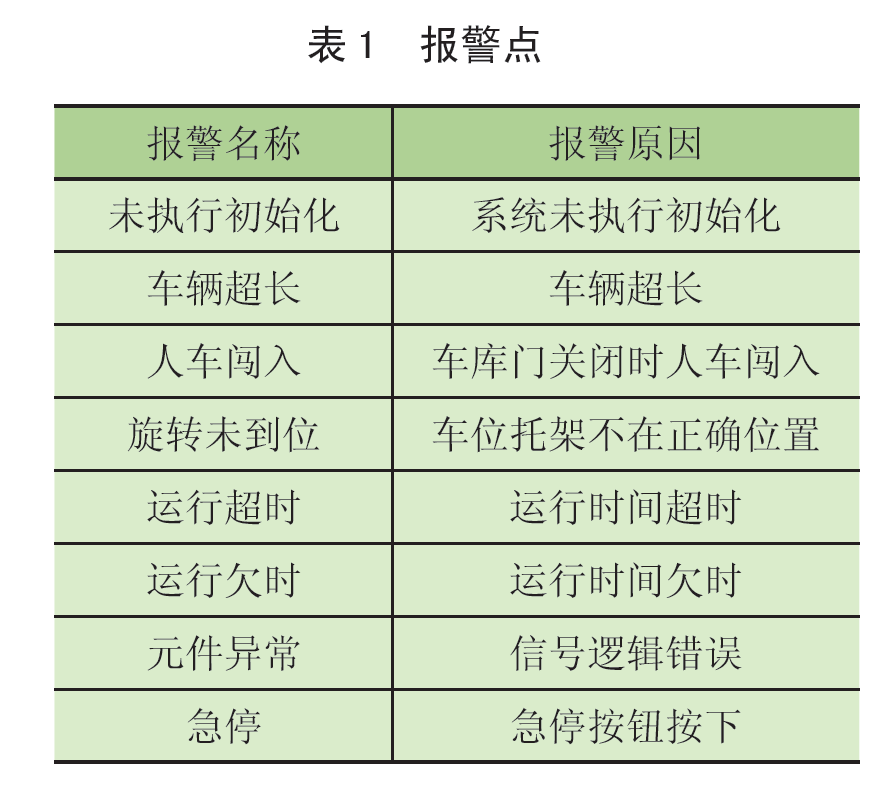
2.2.5 报警功能
当设备出现异常时,控制系统在LED 屏上显示报警信息。用户或者管理员可以根据报警信息迅速判断异常原因和位置,并及时进行合理处置。主要报警点见表1。
硬件设置
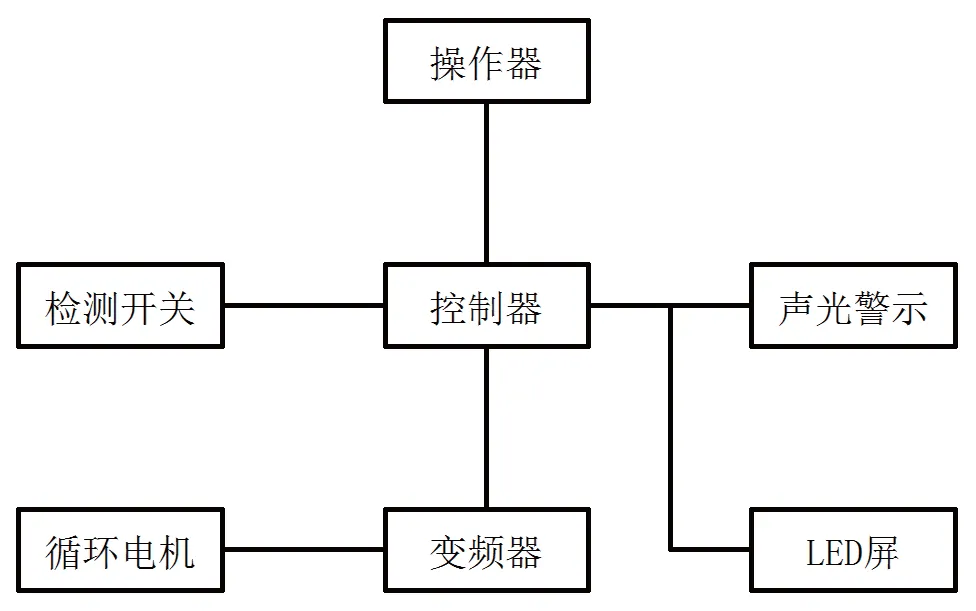
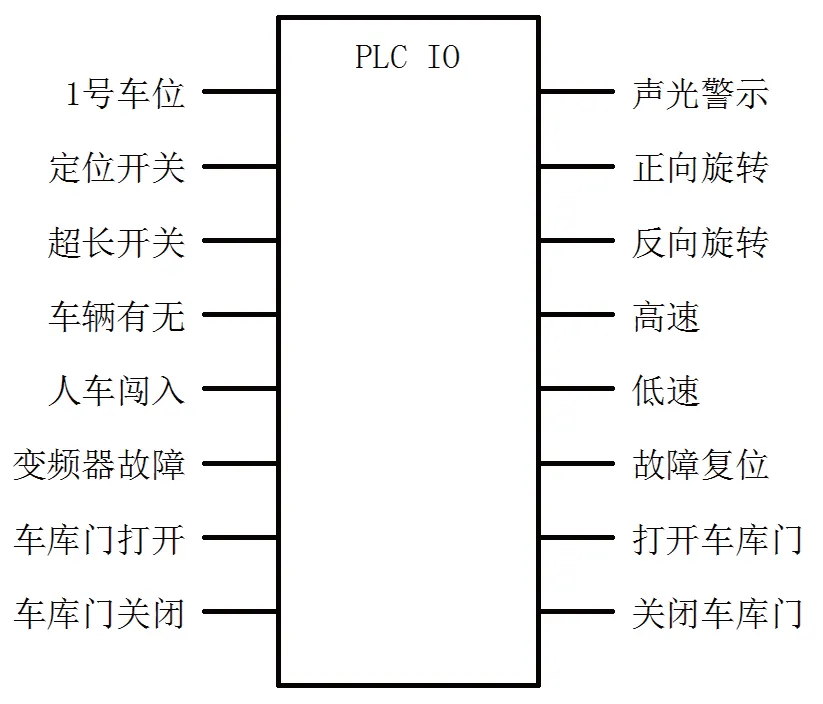
PLC选用欧姆龙CP1E系列。CP1E系列作为欧姆龙经济型控制器,性价比出色,灵活支持小型系统,扩展性高,应用广泛,满足七层12 车位垂直循环式立体车库的性能要求。循环电机变频器使用台达CH2000系列。台达CH2000系列高性能矢量变频器,可满足起重、运输、数控机床等领域的冲击性瞬间负载、高过载及重负荷等特殊需求。其过载能力在额定电流150% 时可达60 s,200% 可达3s。操作器、LED 屏、接近开关和光电开关等控制元件均采用性能可靠的优质产品。控制系统结构如图所示,PLC主要输入输出点如图所示。
程序设置
控制程序由初始化程序段、车库门控制程序段、报警显示程序段和循环存取程序段组成。电机加减速时间和抱闸制动时间通过最大偏载试验进行设定。制动时间短,刹车噪声大,电机抱闸磨损较快;制动时间长,容易出现偏载溜车现象。
4.1 初始化设备上电时,控制器需要记录每个车位的位置以及是否空闲。因此先将设备完整循环运行一圈进行标定,根据检测开关的信号将车位的位置和使用情况依次存储在内部寄存器中。
初始化完成后,空闲车位的数量和号码交替显示在LED 屏上。未进行初始化或者初始化程序被中断时,设备不能在自动模式下运行。
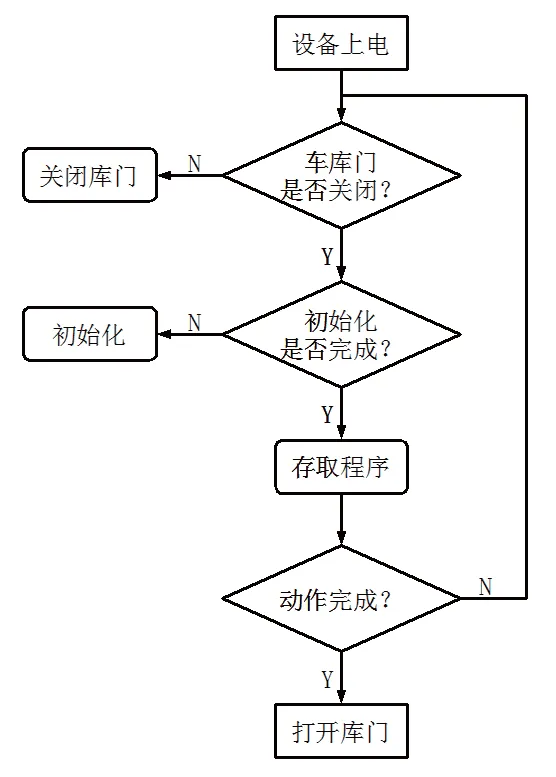
4.2 控制流程程序控制流程如图所示。车库门与循环转动动作联锁,车位托架循环转动的前提条件是车库门必须完全关闭。循环运行结束后,车库门自动打开。
4.3 存取程序
用户输入车位号码后,程序根据各个车位的当前位置,选择耗时最短的旋转方向。
循环转动时,每转动一个车位间隔,根据旋转方向和定位开关的信号,计数器增加或减少计数。通过计数值判断目标车位与地面的距离。
目标车位接近地面时,程序控制变频器进行减速。到达目标位置时,电机停止转动并锁紧抱闸。
结论
垂直循环式立体车库控制系统的实现方法有多种。本文以变频器驱动电机的方式实现电机平缓起停,加减速曲线平滑。根据定位行程,PLC 通过变频器控制电机的转速,高低速搭配运行可显著缩短存取车时间。实际设备完成安装后进行了负载试验,运行平稳,定位准确,效果良好。

